
La réception et le module Flybarless (17/03/2014)
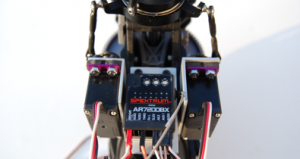 Pour l’utilisation de la tête tri-pales il m’a été conseillé d’utiliser un module Flybarless. Ces modules imposent du câblage supplémentaire avec le récepteur. Ce câblage est volumineux et on augmente le risque de panne électrique. J’ai donc choisi d’utiliser le récepteur AR7200BX (Spektrum) qui intègre le module Flybarless (BeastX). Ce récepteur comporte 7 voies : 6 seront utilisées pour les fonctions standards et la 7ème pour la commande du module de feux dont je ferai la description ultérieurement.
Pour l’utilisation de la tête tri-pales il m’a été conseillé d’utiliser un module Flybarless. Ces modules imposent du câblage supplémentaire avec le récepteur. Ce câblage est volumineux et on augmente le risque de panne électrique. J’ai donc choisi d’utiliser le récepteur AR7200BX (Spektrum) qui intègre le module Flybarless (BeastX). Ce récepteur comporte 7 voies : 6 seront utilisées pour les fonctions standards et la 7ème pour la commande du module de feux dont je ferai la description ultérieurement.
Ceci permet aussi de conserver une grande compacité à la mécanique.
La programmation de l’émetteur (17/03/2014)
 La radio a été programmée en plus des fonctions standard pour avoir les fonctions suivantes :
La radio a été programmée en plus des fonctions standard pour avoir les fonctions suivantes :
-allumage des feux anti-collision et stroboscopique en position milieu de l’interrupteur situé sur le manche de commande d’anticouple/profondeur
-allumage des feux de position en plus des autres en position haute de l’interrupteur situé sur le manche de commande d’anticouple/profondeur
-démarrage du moteur seulement possible si l’interrupteur à positions sécurisées (obligation de tirer l’interrupteur vers le haut pour l’actionner) est abaissé
-démarrage progressif et obtention du régime moteur par un potentiomètre (régime maximum réglable). Le manche de pas/gaz ne gère que le pas
-choix entre le mode normal et conservateur de cap pour le gyroscope à l’aide d’un interrupteur
Le module de télémétrie (17/03/2014)


Étant électronicien de formation je me suis amusé à construire un module de télémétrie/pilotage des feux indépendant de la partie émission/réception. Ce module a été construit sur la base d’une carte Netduino plus 2. Une carte d’interface conçue par mes soins permet de la relier à différents capteurs. Le module communique avec un PC pour transmettre les ordres d’allumage des feux dans un sens et les résultats de mesure dans l’autre.
Le module permet :
-de piloter les feux de l’hélicoptère suivant des séquences programmables
-de mesurer la vitesse de rotation du rotor
-de mesurer la température du moteur
-de mesurer l’altitude
-de mesurer la vitesse
-de mesurer la variation d’altitude (variomètre)
-de mesurer les tensions d’accu
-de connaitre la position GPS
Les parties concernant l’altitude, la vitesse et la position GPS sont encore en cours de développement et me posent quelques problèmes de mise au point mais les autres fonctions donnent entière satisfaction. Le logiciel sur le PC est lui aussi fonctionnel pour la partie pilotage des feux et affichage de la télémétrie en temps réel. Je souhaite y ajouter la gestion de différents modèles et l’enregistrement des sessions de vol : un peu de travail pour l’hiver prochain! En attendant j’ai développé un autre module qui permet seulement de gérer les feux mais cette fois ci à partir d’une voie de la télécommande : description à venir prochainement dans ces pages…