
La mécanique version thermique (15/01/2013)
 La version de base est une mécanique de Raptor 50 thermique achetée d’occasion.
La version de base est une mécanique de Raptor 50 thermique achetée d’occasion.
Elle me servira aussi de machine d’entrainement car je n’ai jamais piloté de modèle réduit d’hélicoptère.
Transformation CCPM (20/02/2014)
La mécanique est à la base munie d’un plateau cyclique commandé en quatre points (Type H1). Les servos sont montés sur la cabane à servos à l’avant de l’appareil qui supporte aussi le récepteur et le pack d’accu de réception.
Cette cabane, très en avant, consomme beaucoup de place dans le nez de l’appareil et ne permettrait pas un aménagement du cockpit satisfaisant.


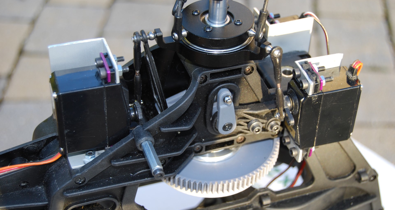
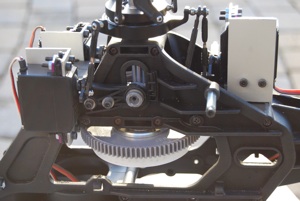
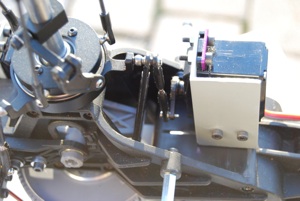
La solution retenue a été d’utiliser un plateau cyclique CCPM à 120° en déplaçant les servos autour de l’axe du rotor en partie haute de la mécanique. Ils ont été fixés par l’intermédiaire de pièces réalisées dans de la cornière d’aluminium. La pièce empêchant la rotation du plateau cyclique a été réalisée à partir de la commande de pas de la mécanique d’origine. Le servo d’anticouple sera fixé à l’arrière de la mécanique sur le tube de queue.
La cabane à servos n’étant plus nécessaire l’espace est maintenant dégagé pour permettre l’aménagement du cockpit.
Pour être plus réaliste une tête tri-pales (Heli-Scale) a été installée.



Transformation électrique (09/03/2014)
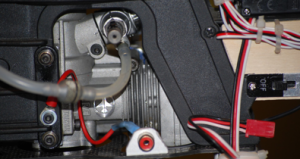
Pour rendre la mécanique plus propre, moins bruyante et avoir moins d’ouvertures à faire dans le fuselage j’ai décidé de la transformer en version électrique. N’étant pas un grand mécanicien j’ai souhaité conserver le plus possible les éléments de transmission. Après calcul de la démultiplication j’ai choisi de monter un moteur Scorpion de 630KV qui sera alimenté en 6S (2 packs de 3S) ce qui devrait permettre d’obtenir une vitesse de rotation rotor comprise entre 1200 et 1500 trs/mn en restant dans une plage acceptable pour le moteur. Le pignon d’origine a pu être conservé grâce à l’aide de Gilbert. Il m’a réalisé un accouplement sur mesure entre l’arbre moteur et le pignon d’entrainement. Le moteur a ensuite été fixé à l’aide d’une plaque en carbone. L’alignement est parfait car même le guidage par roulement en partie haute du pignon a pu être conservé. Le contrôleur est fixé sur la plaque carbone en partie basse de la mécanique. Le tout devrait être bien ventilé.



Reste a installer la partie réception. Ce sera fait en ajoutant un support en aluminium à l’avant pour supporter le récepteur/module Flybarless. L’interrupteur et la led du contrôleur sont montés sur le flanc gauche de la mécanique tandis que l’accu de réception est monté sur une plaque en plastique à l’avant.
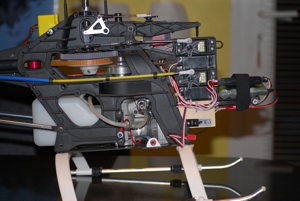
On obtient ainsi une mécanique très compacte et d’un seul tenant : il manque seulement les packs LiPo qui permettront d’alimenter la propulsion.



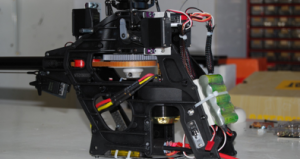 Une mécanique version électrique très compacte.
Une mécanique version électrique très compacte.
Moteur électrique : mise en service (23/03/2014)
Les premiers tours du moteur électrique dans la mécanique modifiée pour supporter le plateau cyclique CCPM à 120° (une petite vidéo ci-dessous). Grande satisfaction : tout semble fonctionner normalement! Le régime moteur est réglable depuis un potentiomètre de la radio et le plateau cyclique réagit bien aux ordres de la télécommande. Prochaine étape : réglages du module Flybarless puis montage sur un train de «Trainer» pour effectuer les premiers essais en vol. A suivre…
Montage sur un train de trainer (25/05/2014)
Le but est de pouvoir tester la mécanique modifiée hors du fuselage. Deux supports de batterie ont été réalisés dans de la cornière d’aluminium et placés de part et d’autre de la mécanique. Ces supports seront aussi utilisés dans le fuselage. Le positionnement des batteries a permit de réaliser un centrage correct, légèrement sur l’arrière. Les réglages du module BeastX ont été repris et légèrement corrigés ainsi que le décalage du plateau cyclique. En statique tout semble correct. Les premiers tours de rotor montrent également que le tracking est bon. Reste maintenant à faire décoller la bête. Mon niveau de pilotage me semble alors bien bas et je vais confier cette tache à un expert pour ne pas risquer de tout casser. Gilbert je crois que c’est à toi…



Premier stationnaire (03/06/2014)
En cette fin d’après midi il n’y a pas trop de vent : c’est donc le moment d’essayer cette mécanique. Gilbert prend les commandes et fait quelques vérifications puis démarrage du moteur. Après quelques secondes l’hélicoptère s’élève pour un stationnaire d’environ 4 mn. S’ensuit un grand soulagement pour moi et surtout une grande satisfaction. Merci à Gilbert et à bientôt pour les premières translations.



Premier stationnaire perso et mode Governor (24/08/2014)
Après un réglage laborieux du mode Governor du contrôleur Scorpion c’est décidé je me lance pour mon premier stationnaire perso. Une petite vidéo ci-dessous.